 平台热线
平台热线



安川机器人配件各轴脉冲比计算办法教程!
YASKAWA安川电机有限公司,其机器人品牌MOTOMA,由于发展策略问题,安川机器人配件控制器有两大类别:一种是支持用脉冲树表示点数据(前期的产品);一种是即支持脉冲,又支持按欧拉角坐标系表示点数据。
随着近年离线编程软件的兴起,因为不知道安川机器人各轴的脉冲比(发送脉冲和机器人关节转动角度的比值),因此用离线编程软件控制这类机器人时,就会遇到如何测算身边的安川MOTOMAN机器人各轴脉冲比的办法。下面通过调试MOTOMAN-MA1440机器人,控制器为DX200(其他机器人与之类似,不再详述,差异之处会简单注释讲解),给大家简单讲解一下测试安川机器人脉冲比的办法
一、通过示教器直接查看减速机的减速比
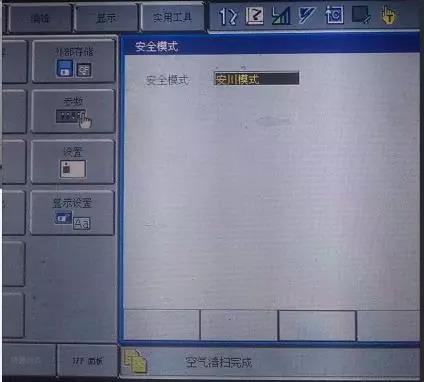
1.将示教器调为安川模式:
2.查看参数 RCxG:切换到【主菜单】/【参数】页,通过下侧左右翻页按钮,翻到显示【RCxG】按钮的地方,单击

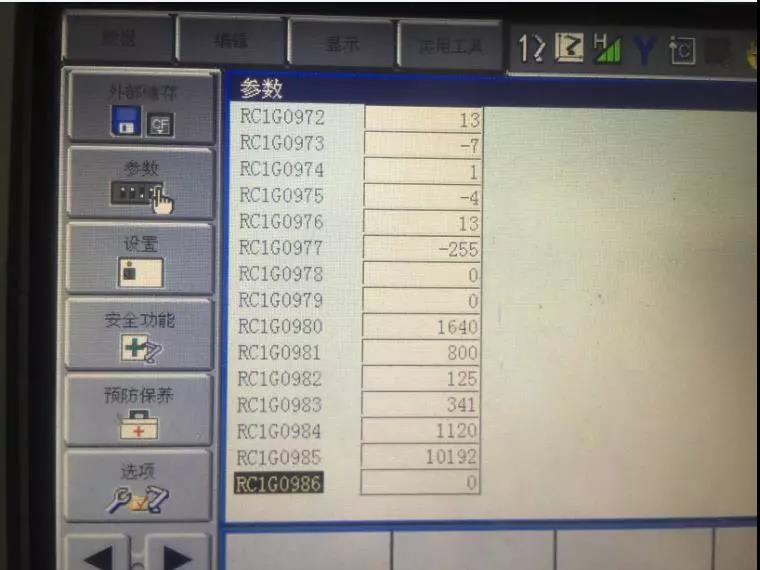
3.打开RCxG参数界面后,向下滑动,找到0972-0986区间位置,改显示为减速机转速比
4.了解脉冲和安川电机转数的关系:安川机器人电机旋转1周 ,需要4096个脉冲
5.计算脉冲比:理解参数RC1G0972-RC1G0986这段数据的意思
a.第二列的正反:表示RobotArt定义安川机器时各轴的正方向设定时的状态,正好和后面的负数相对应,也表明负数代表传动比和选向信息。(安川机器人算法和我们标准机器人定义算法一致)
b.表里的S、L、U、R、B、T分别代表机器人的第1-6轴;
c.RCIG0978、RCIG0979和下面的RCIG0986、RCIG0987是变位机
6.折算S、L、U、R、B、T六个轴的减速机传动比:各机器人关节转动1周,电机需要转多少转:将RC1G0980-RC1G0985各行 / 对应的RC1G0972-RC1G0977各对应行 = 各轴各轴的变速机传动比
比如:计算第1轴S轴减速机的减速比
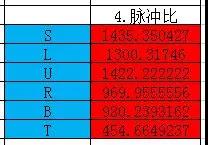
7.计算S、L、U、R、B、T六个轴的脉冲比:各机器人关节转动1度,需要给电机发送多少脉冲,结合脉冲和安川电机转数的关系,各轴关节转动一轴(360度),需要的脉冲数为:4096脉冲乘以机器人各轴的减速机减速比;而各轴的脉冲比是,各轴关节旋转1度时,所需要的脉冲。因此,需要将上述结果除以360 即可。(安川机器人配件)
举例:第1轴(S轴)的脉冲比,计算公式为:

下图是计算出的MOTOMAN-MA1440-DX200机器人各轴减速机的脉冲比
了解更多机器人相关点击:安川机器人配件
